博文
双层模型预测控制系统的多包镇定域分析与系统设计
|
引用本文
朱宇轩, 李少远. 双层模型预测控制系统的多包镇定域分析与系统设计. 自动化学报, 2018, 44(2): 262-269. doi: 10.16383/j.aas.2018.c160394
ZHU Yu-Xuan, LI Shao-Yuan. Analysis and System Design of Multi-convex Hull Stabilization Domain for Double-layered Model Predictive Control System. ACTA AUTOMATICA SINICA, 2018, 44(2): 262-269. doi: 10.16383/j.aas.2018.c160394
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c160394
关键词
双层模型预测控制,约束,可镇定域,动态控制,闭环稳定性
摘要
针对双层模型预测控制(Model predictive control,MPC)中出现的由于系统状态在动态控制(Dynamic control,DC)过程中超出约束集,导致下层优化不可行的问题,本文在综合控制方法的基础上提出一种新的动态控制策略,引入多包镇定域(Multi-convex hull stabilization domain,MHSD)的概念.通过离线计算多包镇定域,并根据系统每一时刻的实测状态值,在线决定(Dynamic control)层的镇定域以及相应的控制时域,结合变约束思想,保证动态控制过程递归可行,从而有效控制在大范围内变化的系统状态.另外,本文通过设计非线性反馈控制器,扩大了终端不变集和多包镇定域的范围,提高了DC层对稳态目标值的跟踪效果.本文的控制算法可以使得DC层在目标跟踪过程中保证递归可行性,并最大程度地实现无静差跟踪.仿真算例验证了本文算法对稳定系统和不稳定系统都有效.
文章导读
模型预测控制技术[1-3] (Model predictive control, MPC)是一种先进控制技术, 能够对复杂的多变量对象提供整体的设计方案, 并在线直接处理系统的输入、输出(或状态)约束.近年来为满足大型企业提出的控制要求, 推出了由实时优化(Real-time optimization, RTO)和双层模型预测控制构成的分层递阶控制结构[4-6], 其中双层模型预测控制技术在原有的滚动时域控制的上层添加了稳态目标计算(Steady-state target calculation, SSTC)作为上层, 使系统可以更加灵活地处理约束条件.在实际的工业过程中, 外界目标会因突然出现的扰动或操作人员的输入而发生变化, 这时双层的控制结构依然可以借助上层的稳态优化, 对系统输入和输出的稳态设定值进行更新, 从而保证动态控制的实时性和有效性.
目前, 针对双层预测控制系统的结构问题和实际应用, 国内外已经形成了一些研究成果:文献[7]系统地提出了双层模型预测控制的整体解决方案, 分开环预测、稳态目标计算和动态控制三个模块进行分析, 并保证了三个模块在模型、约束、目标上的一致性.文献[8]详细阐述了双层结构中的约束调整策略, 保证了约束集的相容性并简化了动态控制目标.但双层模型预测控制的研究难点:稳定性分析, 在国内外均没有系统性成果.作为预测控制稳定性分析的经典著作, 文献[9]在前人的研究成果基础上, 归纳出了控制"三要素":局部控制器、终端不变集[10-11]和终端代价函数, 保证了被控系统的闭环稳定性, 为后续的研究奠定了基础.本文在前人对单层预测控制稳定性的分析和无静差跟踪的研究基础上, 构建了双层预测结构的算法框架, 如图 1.
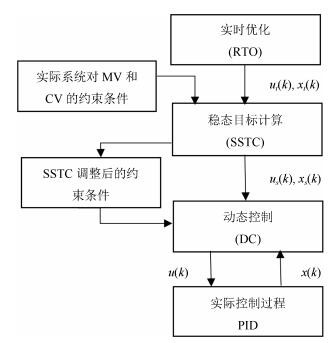
图 1 双层模型预测控制结构
为了解决如下两个问题: 1)稳态目标值随外部目标变化, 每一时刻的最优稳态值都没有固定的位置, 很难实现实时的准确跟踪; 2)双层结构的信息流是单向的, 不存在反馈调节, 当下层不可控时, 上层无法做出及时调整, 所以动态控制(Dynamic control, DC)层的可控状态范围较小, 本文提出了基于多包镇定域的动态控制策略, 保证了系统的闭环稳定性以及算法的递归可行性, 为大范围内变化的系统状态提供有效的控制作用, 并最大程度上跟踪稳态目标.具体而言, 首先离线计算"三要素", 并采用模型逆算法计算在某一控制时域内, 模型的可镇定范围.通过逐步扩大控制时域, 得到一系列可镇定域, 这些镇定域中包含了系统每一时刻的状态值, 选择包含它且最小的可镇定域, 同时确定该镇定域对应的控制时域, 然后运用变约束策略设计优化问题, 有效地将系统状态驱动回不变集, 完成对设定值的跟踪.上述算法可保证DC层优化问题在跟踪稳态目标值过程中的可行性.
本文第1节介绍采用的系统及相应的约束等; 第2节分析动态控制层遇到问题, 提出多包镇定域计算算法, 给出解决问题的基本方案; 第3节进行算法的稳定性分析; 第4节的仿真验证了前述算法的有效性; 第5节小结全文.

图 2 纸机系统的多包镇定域

图 3 控制时刻k从31到60对应的纸机系统控制过程
本文针对双层模型预测控制结构中存在的系统状态"违约"问题, 设计了带有饱和特性的反馈控制器、受控不变集和终端代价函数, 保证了闭环系统的稳定性, 并在此基础上提出一种多包镇定域算法, 结合变约束的思想, 对动态控制层进行了改进, 提高了双层模型预测控制算法对系统状态的动态控制能力.
作者简介
朱宇轩
上海交通大学硕士研究生.主要研究方向为模型预测控制.E-mail:xuan1788@163.com
李少远
上海交通大学自动化系教授.主要研究方向为预测控制, 模糊控制, 自适应控制理论与应用.本文通信作者.E-mail:syli@sjtu.edu.cn
https://blog.sciencenet.cn/blog-3291369-1422639.html
上一篇:基于ACP行为动力学的犯罪主体行为平行建模分析
下一篇:【当期目录】IEEE/CAA JAS第11卷第1期
